WEEK 12

Pitching a New Direction
Trying to understand what I am really studying
I came into this week still unsure of my direction. Instead of waiting for clarity, I made a slide deck to force myself to articulate a path. Laying things out helped me see gaps, contradictions and places where the idea felt thin.
Preparing the deck
I had been leaning away from craft without replacing it with anything equally grounded. The deck let me test whether my threads of care, imperfection and interaction could hold a full project.
[ Care in human machine interaction ]
What I meant by care
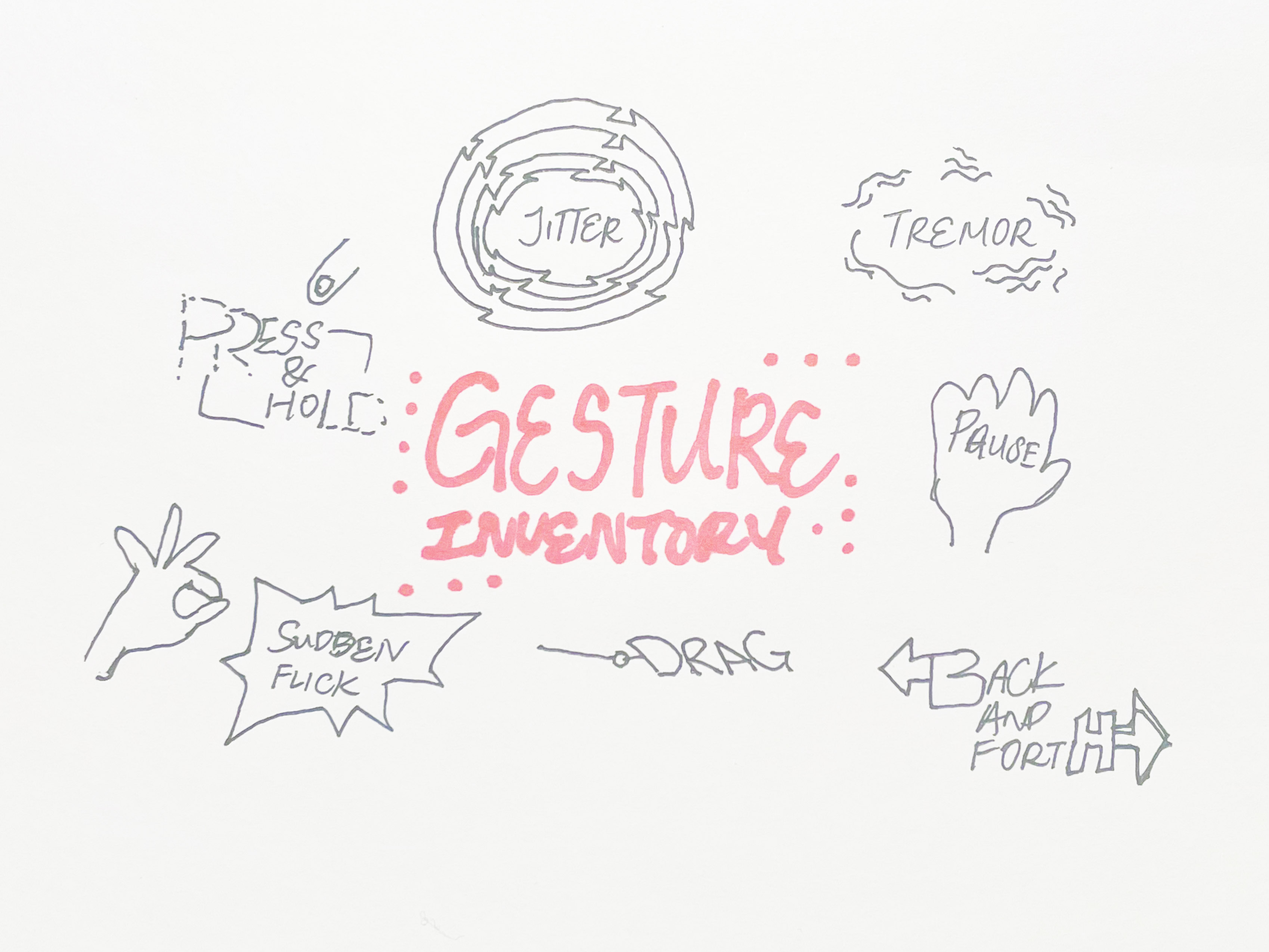
Attention, adjustment, presence
I tried to define care more clearly. For now it sits in small adjustments people make when interacting with a system. These differences feel like traces of presence rather than mistakes.
I also began thinking about how machines respond. Sound, light or motion can become feedback that makes these gestures visible.
Pillars of care
Three ideas that stabilised the project
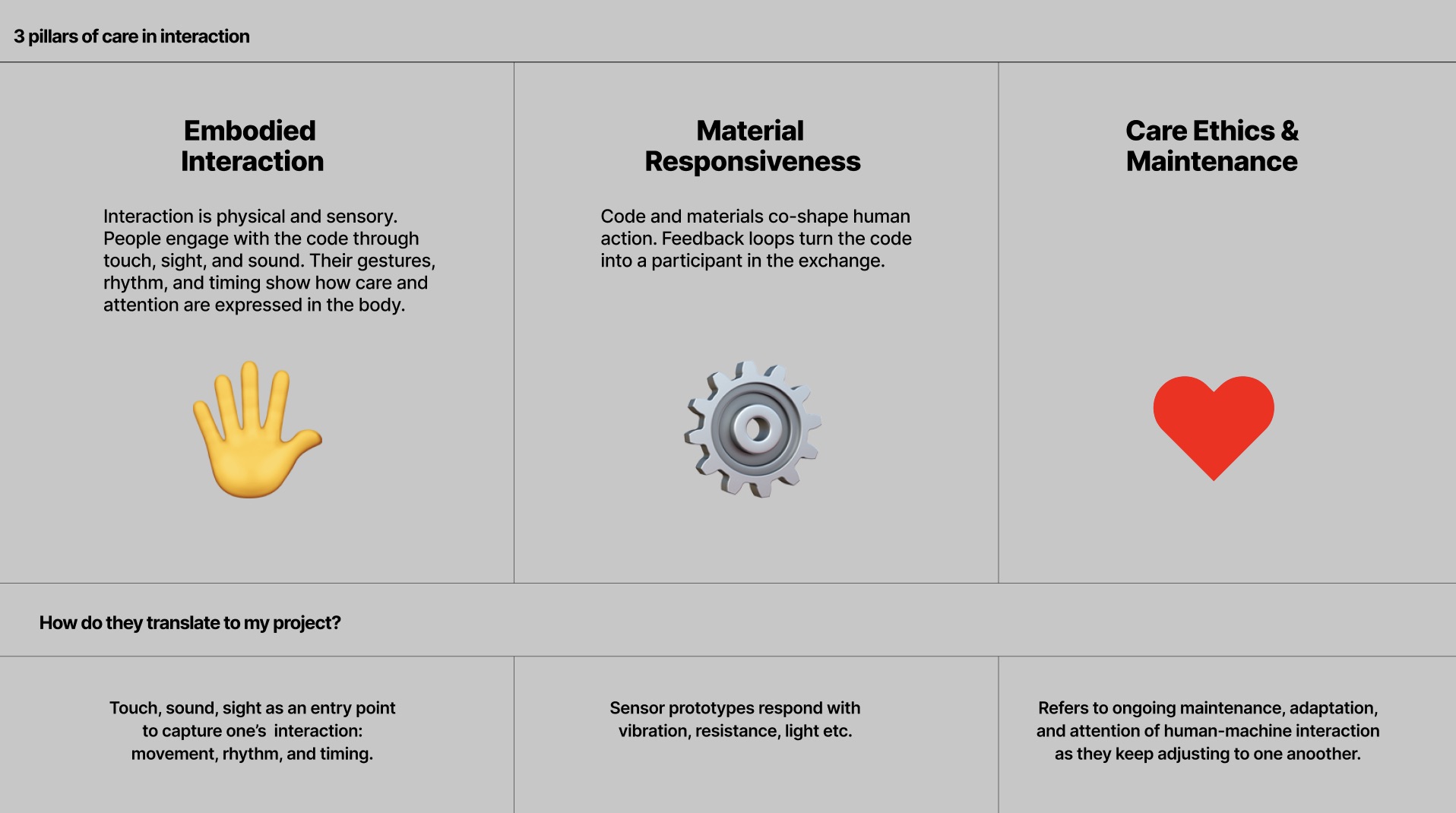
I framed the work through three pillars to understand where my attention keeps returning: movement, responsiveness and maintenance.
Embodied interaction
Gestures, timing and rhythm reveal how someone attends to a system.
Material responsiveness
Sensors and code behave as part of the exchange rather than passive receivers.
Care ethics and maintenance
Care is ongoing attention. Imperfection becomes a sign of this attention.
[ Literature ]
Sara Eriksson
Describes movement as co created between bodies and systems. Care appears in timing, adjustment and how people subtly respond to each other.
Den Teuling
Uses humidity sensitive chitosan to show how softness, delay and environmental change can become active design tools rather than problems to remove.
Ana O Henriques
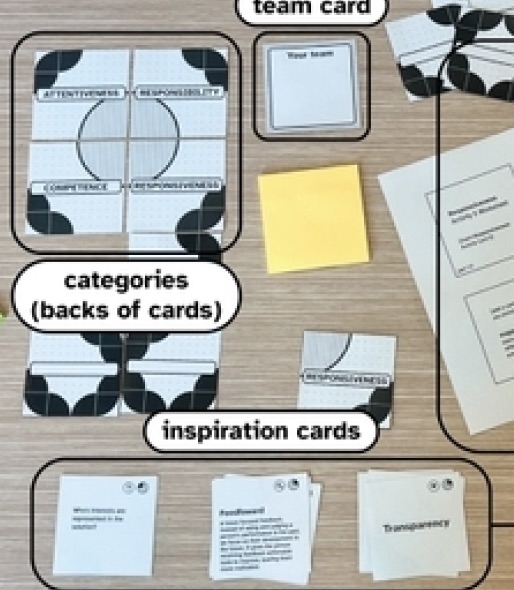
Frames care as shared responsibility between user and system, where maintenance, response and attention are distributed instead of belonging to one side.


[ Precedents ]
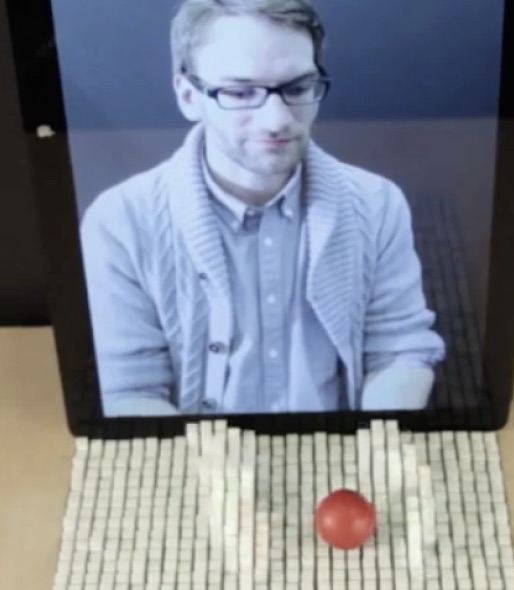
MIT Tangible Media Group
Responsiveness made physical and visible.

Transhuman Ansambl
Sixteen virtual singers responding to voice. Variation becomes expression.

Miu Ling Lam
A plotter that embraces resistance. Irregularities become part of the drawing.
[ Concept ]
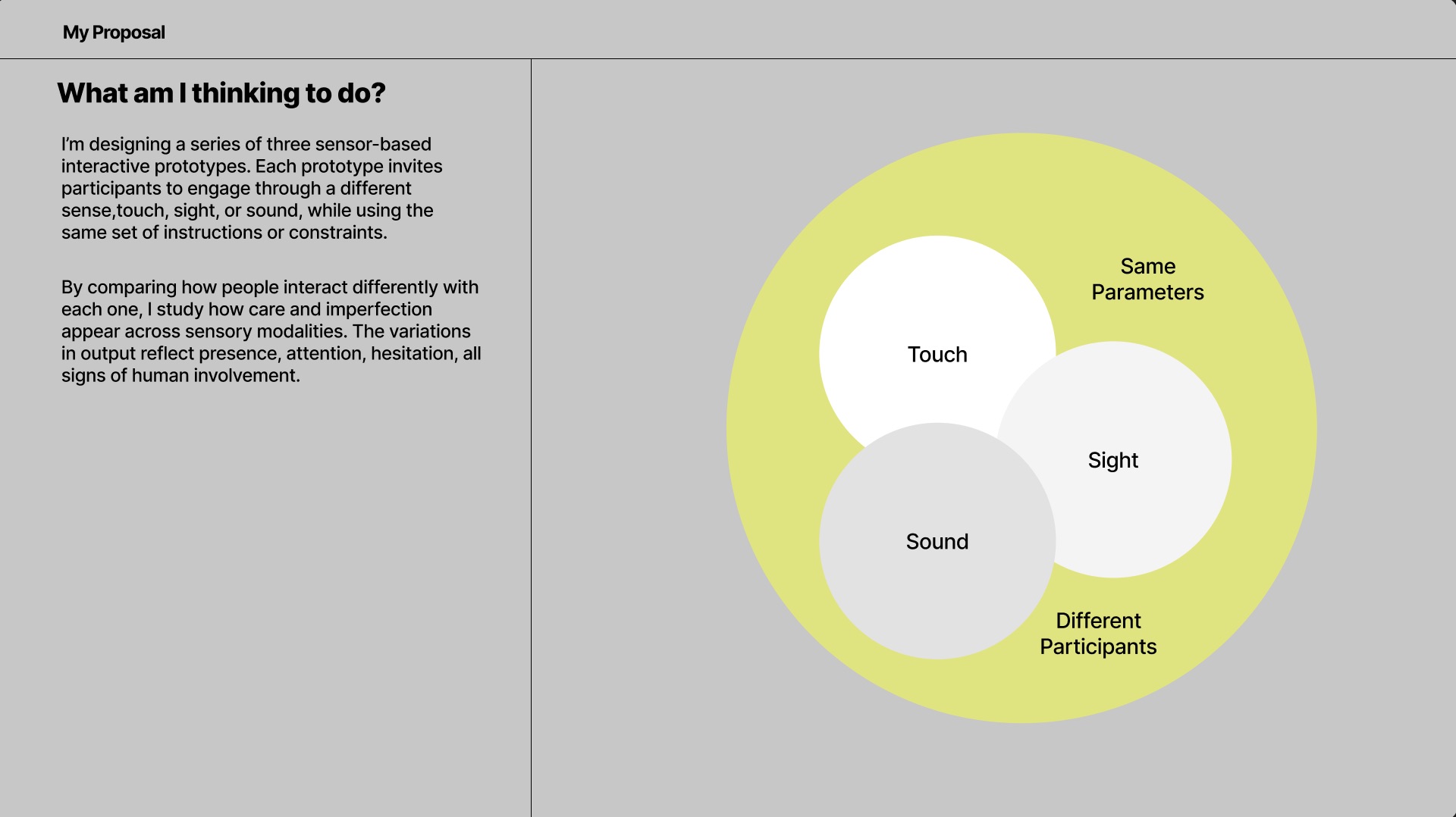
Three sensory prototypes
Comparing touch, sight and sound
The plan uses three prototypes that all follow the same instructions but rely on different senses. The comparison between them is the study, not the individual objects alone.
[ Prototype exploration ]
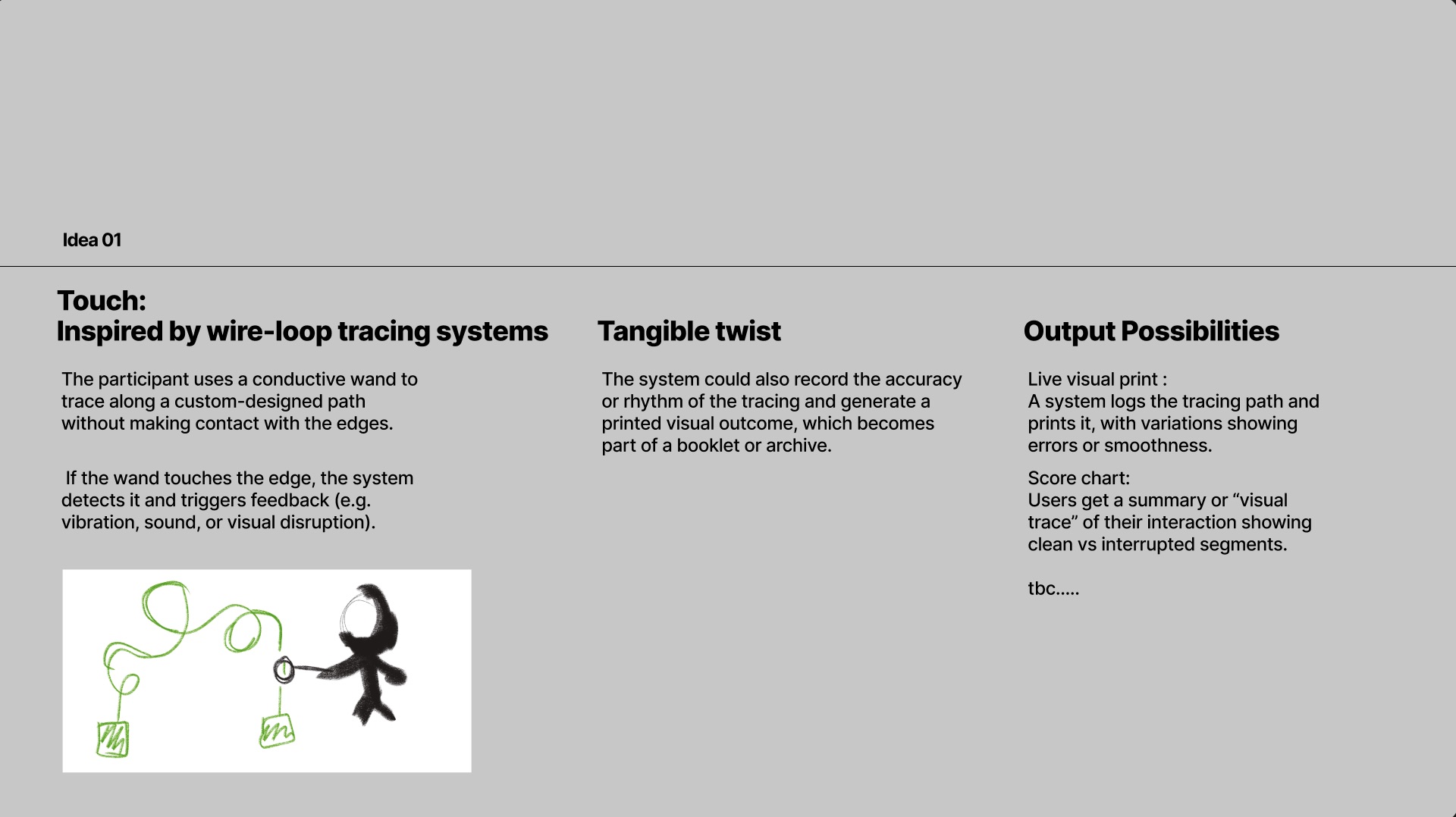
Touch
Tracing system inspired by wire loop games
A conductive wand follows a path. Touching the edges triggers feedback, and the system can record the path and convert it into a visual print.
[ Consultation and craft ]
What the consultation revealed
Keeping craft inside the project
I had been tempted to remove craft to make the research cleaner. During consultation, Andreas caught that immediately. He said my understanding of craft was still too shallow, and removing it would only make the project weaker.
He widened the frame. Craft is not only embroidery, thread or foil. It also includes shaping circuits, testing sensors, tuning thresholds, wiring boards and adjusting behaviour through real time feedback. Once he said it, I realised I had been deciding what counted as good craft based on aesthetics rather than material labour.
He left me with one clear instruction for the wire prototype: build it. Not plan it. Not map it. Build it, and let the system teach me through its behaviour.
[ Loops, direction and next steps ]
Cybernetics and gesture
Gesture inside a feedback loop
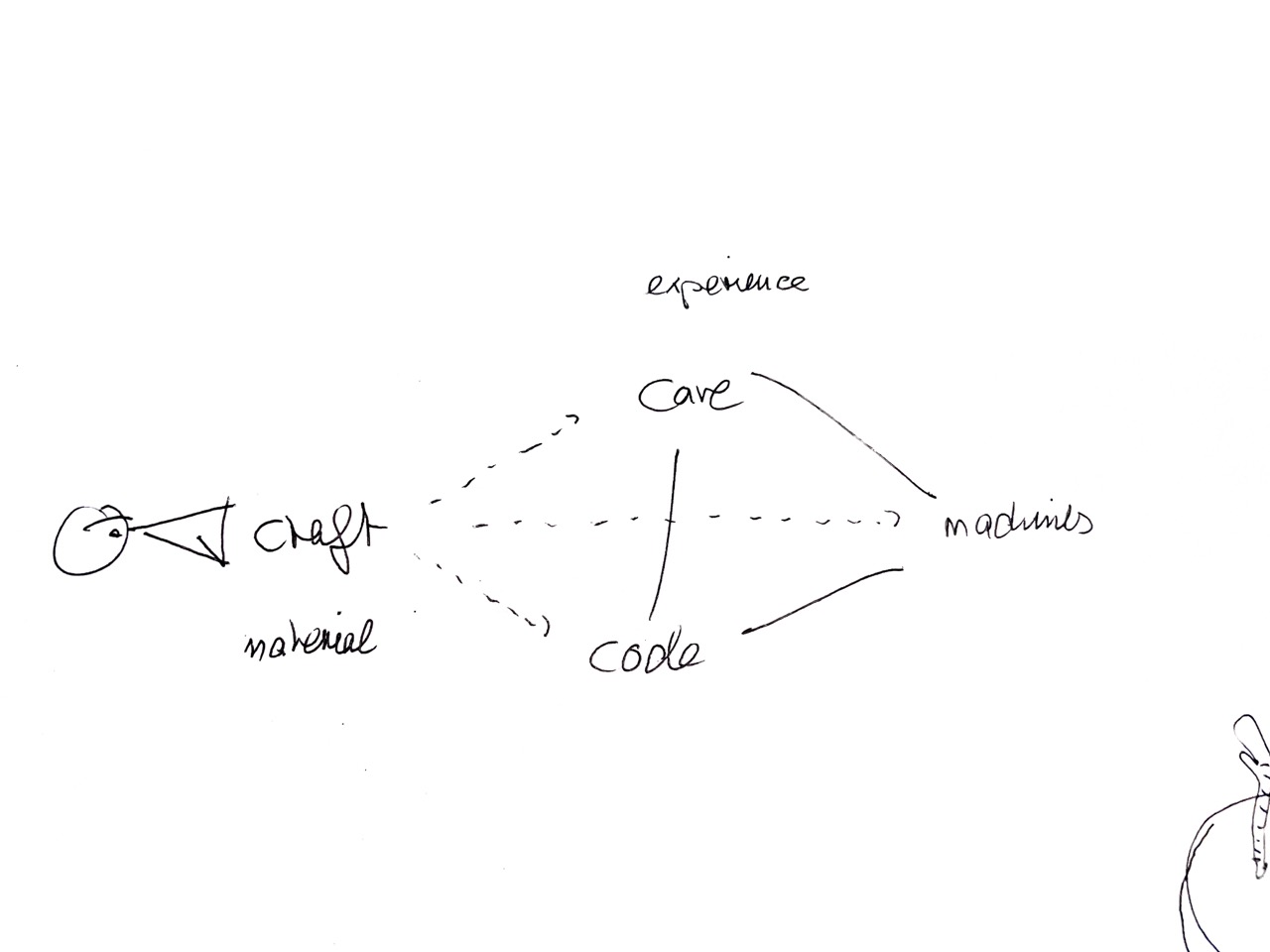
Andreas pointed me toward cybernetics, which deals with behaviour, feedback and regulation. Designers like Dubberly use cybernetic diagrams to show how modern design is less about static objects and more about shaping loops.
Second order cybernetics places the designer inside the loop. This matters here because my body is directly involved in the experiments. When I move my hand, the system responds. When the system responds, I adjust my movement. That cycle repeats.
Even a simple sensing system works like this: gesture → sensor → code → output → gesture again.
I am interested in the imperfections that appear inside this loop: a sensor that lags, a threshold that fires too early, a gesture that changes because the feedback felt too strong. These small shifts show how embodied movement and computation negotiate each other in real time.
Instead of asking if the prototype works, cybernetics nudges me to ask what behaviour it encourages, where the loop breaks or hesitates, and how the system shapes my movement as much as I shape it.
How this changed my direction
Bring craft back in
This consultation gave me a grounded way to understand what I am already doing, I just need to frame it properly.
Craft must stay, not as decoration but as a way of shaping behaviour. Circuits and sensors are craft materials because they require touch, tuning and iteration. Cybernetic loops help me think about where gesture enters the system and how it changes.
Prototypes are are thinking tools. I will learn more from a messy first build than from another week of planning. Gesture sits at the start of the loop, so I need to understand it deeply before I follow it further into computation and material.
This pulls Week 12 directly into the next phase of the project: start building, observe behaviour, and let the system show me what gesture becomes.
Next steps: P5.js
Embodied Gesture
To move forward, I need to look at gesture more closely on its own terms. Before building new hardware, I used a simple p5.js camera sketch to track my finger and draw in real time. This gave me a clearer view of what my hand actually does: the pace, the pauses, the hesitation and the small shifts that never show up in still photos.
Use p5.js to capture raw movement
The camera sketch lets me follow the path of my finger directly on screen. It turns movement into a visible trail without extra layers of hardware. This helps me observe timing and rhythm without distractions.
Pay attention to the nuances of the gesture
Where does my finger slow down. Where does it speed up. Where does the line wobble even though my hand feels steady. These moments start to show what my gesture contains before any sensor interprets it.
Look at what changes over time
Repeating the same movement produces different traces. Some lines are tight. Some drift. Some carry tension from my hand. These differences are useful because they show variation inside my own gesture rather than inside a machine.
This stage is about understanding the movement itself. Before building more sensing hardware, I want to see what gesture already gives me: rhythm, variation, pressure and small inconsistencies that will later interact with sensors, code and materials.